如何高效利用机器人辅助手术治疗子宫颈癌?
去年,《子宫颈癌腹腔镜技术诊治指南(2023年版)》为临床规范化运用腹腔镜技术治疗宫颈癌提供依据。而对术者来说,机器人手术系统可以改善操作时人体工程学方面的困难,避免长时间站立,减少疲劳感,克服技术限制,简化复杂手术操作,缩短手术操作时间,降低手术难度,也更加符合外科加速康复的理念。
自2005年正式应用临床以来,达芬奇机器人手术系统以独特的三维立体手术视野和震颤过滤装置,克服了开腹和传统腹腔镜的反直觉动作,尤其在盆腔深部处理宫旁组织、输尿管隧道及保留神经手术中优势明显,目前广泛应用于各种妇科疾病的治疗。
本文基于《机器人辅助手术治疗子宫颈癌中国专家共识(2024版)》,整理了机器人辅助手术治疗子宫颈癌的适应证、技术流程和注意事项。
一、机器人辅助腹腔镜手术在子宫颈癌手术中的适应证
1、不保留生育功能手术
适应证:同《子宫颈癌腹腔镜技术诊治指南(2023年版)》。
术式包括:广泛性子宫切除术、盆腔淋巴结切除术、腹主动脉旁淋巴结活检术或切除术。
推荐意见:子宫颈癌不保留剩余功能时需根据疾病分期选择不同治疗方案,主要包括机器人辅助筋膜外全子宫切除术、机器人辅助广泛性或改良广泛性子宫切除术+盆腔淋巴结切除术或前哨淋巴结(SentinelLymphNode,SLN)显影。机器人辅助手术应详细告知患者及家属现有的临床研究数据及国际公认指南推荐,充分知情同意。(推荐等级:2A类)
2、保留生育功能手术
适应证:同《子宫颈癌腹腔镜指南(2023年版)》。肿瘤病灶小于2cm的鳞癌和普通腺癌患者是保留生育功能的主要适宜人群。
推荐意见:不推荐特殊病理类型的子宫颈癌患者保留生育功能(包括宫颈小细胞神经内分泌癌、子宫颈胃型腺癌等)。保留生育功能子宫颈癌根据不同分期选择相应的方案,包括宫颈锥切术、宫颈切除术,必要时配合机器人辅助腹腔镜行经阴广泛性宫颈切除术+盆腔淋巴结切除术±腹主动脉旁淋巴结取样术。机器人微创手术系统是针对有生育要求的子宫颈癌早期患者的可选方案。(推荐等级:2A类)
3、放化疗后局部晚期子宫颈癌的应用
局部晚期子宫颈癌的狭义定义:局部肿瘤大于等于4cm的Ⅰ~ⅡA期以内的ⅠB3和ⅡA2期子宫颈癌。
推荐意见:在局部晚期患者放、化疗后的手术治疗路径选择上,机器人辅助手术具有一定的优势,可作为优选方案。(推荐等级:2B类)
二、机器人治疗子宫颈癌手术操作的规范流程
1、术前评估、术前准备
同《子宫颈癌腹腔镜技术诊治指南(2023年版)》。
2、手术体位
体位:头低足高的Trendelenburg。
具体操作:患者臀部移出手术床缘外8~10cm,放置肩托、约束带、腿托等避免头低足高位后患者下滑。
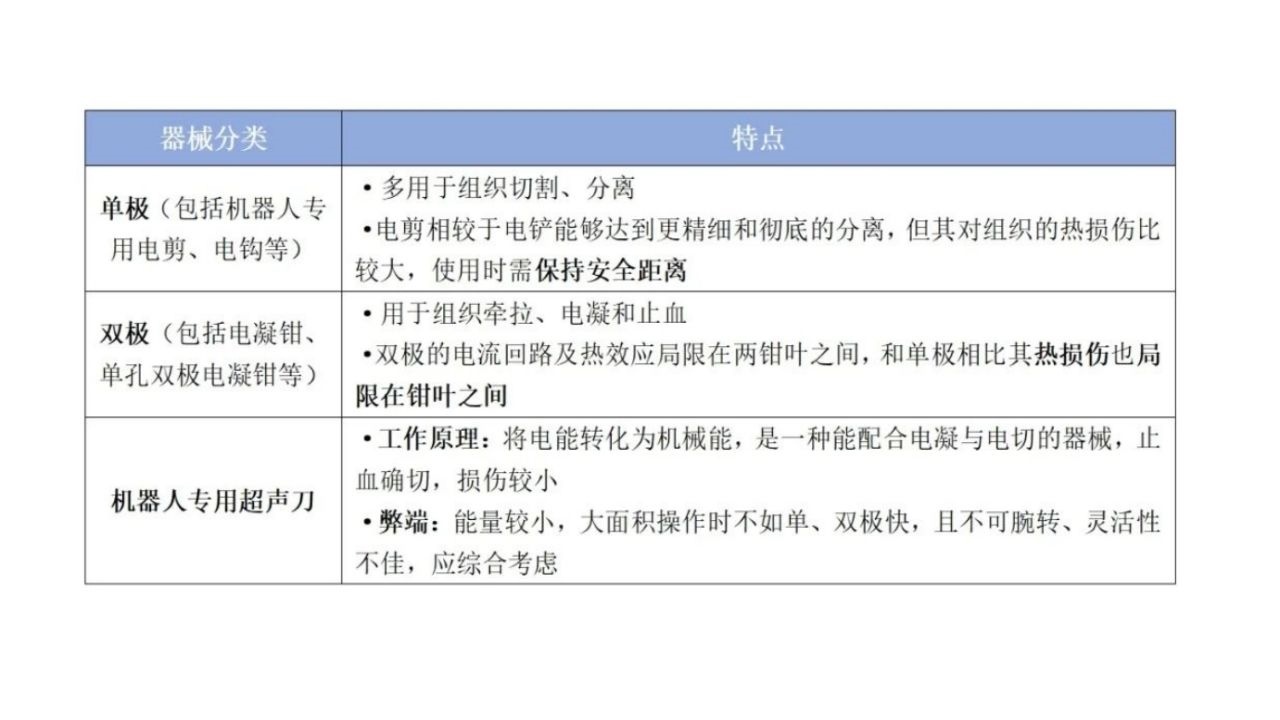
3、机器人专用器械
4、穿刺孔选择及机械臂连接
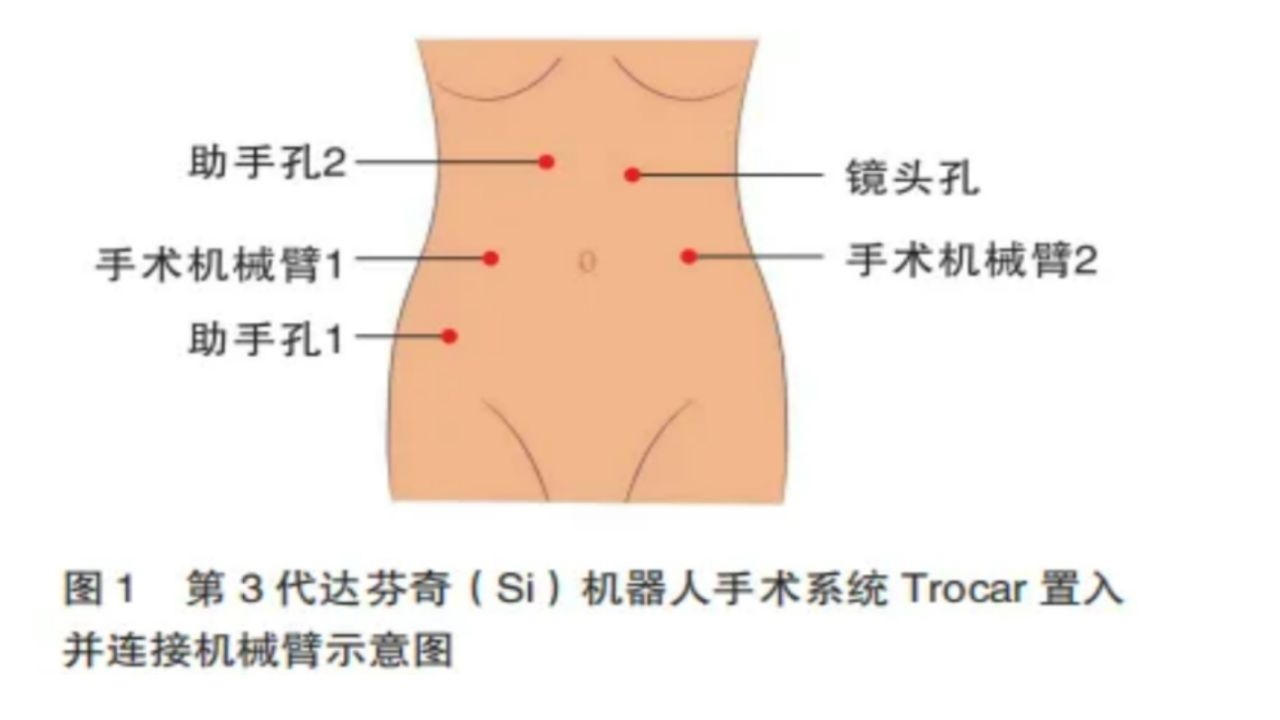
(1)第3代达芬奇(Si)机器人手术系统
·Veress针闭合法建立人工气腹。
·脐上正中距离耻骨联合20~25cm(约为脐上2~4cm)向左侧2~3cm处置入12mmTrocar(镜头孔),用来放置机器人内镜头。
·镜头孔右侧10~13cm,偏脚侧15°~30°,置入第1个8mm机器人专用Trocar,用于与1号机械臂连接。
·镜头孔左侧8~10cm,偏脚侧15°~30°,置入第2个8mm机器人专用Trocar,用于与2号机械臂连接。
·镜头孔与1号臂穿刺孔连线中分线上偏头侧距离机械臂穿刺孔至少5cm处置入5mm的辅助操作用Trocar(助手孔2)。1号臂穿刺孔右侧6~8cm,偏脚侧15°~30°处置入10mm的辅助操作用Trocar(助手孔1)。穿刺点应高于髂前上棘至少3cm。
·机器人手术平台经患者脚侧进入固定于患者右侧,手动连接机械臂与Trocar,插入机器人内镜器械后,调整机械臂至最佳操作位置,根据是否举宫、是否行盆腔或腹主动脉旁淋巴结切除等因素,选择性增加第3个手术机械臂。
(2)第4代达芬奇(Xi)机器人手术系统
·所有端口均为8mm
·Veress针闭合法建立人工气腹
·取脐上缘穿刺8mmTrocar,此孔为镜头孔
·平行脐部穿刺孔左侧6~8cm置入第1个8mm机器人专用Trocar,连接1号机械臂
·平行脐部穿刺孔右侧6~8cm置入第2个8mm机器人专用Trocar,连接2号机械臂
·1号机械臂左侧6~8cm略向下置入助手孔
·第3个手术机械臂置入位置为平行于2号机械臂右侧6~8cm处

Trocar置入的基本原则:各机械臂之间留有足够的距离,一般大于8cm(第3代达芬奇机器人手术系统较第4代要求更高一些)。机器人助手辅助孔的位置应设置在两个手术机械臂连线的外侧,避免术中各机械臂互相影响。
机器人手术系统较传统腹腔镜优点:无需助手调控镜头,术者直接操控镜头能让术者在最佳视野中进行手术,减少因配合不佳导致的不良影响,助手可利用辅助孔进行牵拉、抓持、清理术野、传递物品(包括缝针、纱布、止血材料等)、更换机器人器械等。
5、手术范围和操作步骤
不同期别子宫颈癌的子宫切除范围不同。
(1)盆腔淋巴结切除术
子宫颈癌的淋巴结切除范围:髂总动脉水平及以下的各组盆腔淋巴结,包括髂总、髂外、髂内、闭孔和腹股沟深区(髂外血管远端)淋巴结。
操作步骤:
1)详细检查腹腔脏器表面有无转移结节,子宫及周围韧带有无肿瘤侵犯,有无肿大淋巴结等。
2)充分暴露该侧盆腔血管及淋巴组织,显露髂外、髂内血管及闭孔神经,同时应避免输尿管的损伤。
3)单极电钩或电剪沿髂外动静脉的表面自上而下切除淋巴组织。电铲紧贴血管在淋巴结与血管之间的疏松结缔组织中走形或应用机器人专用超声刀将血管周围的淋巴脂肪组织一并切除,必要时通过应用双极(包括电凝钳、单孔双极电凝钳等)电凝后切断分支血管,注意血管主干和伴行神经的损伤。
建议:整块切除盆腔淋巴结,以锐性切除为主,充分闭合淋巴管,降低术后淋巴潴留囊肿及淋巴漏的风险。淋巴结切除过程中无瘤原则贯穿始终,应遵循“从上到下,由外及里,由浅入深,整块切除”的淋巴结切除方式。
4)将切除的淋巴组织装入一次性标本袋,后经10mmTrocar孔或阴道取出,并送术中冰冻病理检查,明确有无淋巴结转移。
*第4代达芬奇(Xi)机器人手术系统内嵌无缝集成的荧光显影,可帮助识别关键解剖部位,以及实时评估血管、器官组织的血液灌注、SLN等。
(2)腹主动脉旁淋巴结切除术
切除范围:通常限于肠系膜下动脉水平。
操作步骤:使用3号机械臂(或助手辅助)的无损伤抓钳,将大网膜和肠管推向患者头侧,利用Trendelenburg体位,充分暴露腹主动脉主干,以肠系膜下动脉为标记点,依次切除该范围内的淋巴脂肪组织,两侧达左右髂总血管。
*术者需熟悉腹主动脉区解剖,避免出现副损伤。
(3)广泛性子宫切除术
技术要点:
Ø从起始部切断子宫动脉,将输尿管完全游离,侧方宫旁组织应在髂内动脉水平切除,腹侧宫旁的膀胱子宫颈韧带应切除到膀胱,而在背侧宫旁的骶韧带应切除到骶骨水平。
Ø不强调切除过长的阴道壁,但要求阴道切缘至少与肿瘤保持2cm的距离。
Ø根据是否保留盆腔自主神经,又分为C1型(保留神经的广泛性子宫切除术)及C2型(不保留神经的广泛性子宫切除术)。
Ø手术过程中,易损伤输尿管的手术步骤主要是打输尿管“隧道”和髂内、外血管分叉上方高位凝闭卵巢动静脉。手术时要时刻注意解剖位置和输尿管的走形,以免输尿管的血运遭到破坏而影响其功能发挥,尽量避免损伤输尿管鞘膜。
Ø无保护措施下的腹腔内阴道离断违反无瘤原则,阴道断端闭合技术是一种简单的保护性操作,可防止腹腔镜广泛性子宫切除术期间肿瘤暴露和操作。镜下缝扎阴道中上段、放置EndoGIA(Turkey)吻合器、自制简易的套扎圈、无菌扎带等,都能预防离断阴道时可能导致的肿瘤暴露。
Ø推荐经阴道缝合阴道残端。
(4)关闭腹腔
检查操作范围内出血情况,精准止血,用3000ml灭菌注射用水充分冲洗腹盆腔,留置盆腔引流管,移除机器人设备,关闭气腹,排空腹腔内残留CO2气体后移除各Trocar,缝合腹壁穿刺孔。
推荐意见:手术过程中严格遵循无瘤原则,包括不使用举宫器或举宫杯,避免挤压肿瘤;避免气腹状态下切开阴道;离断阴道前推荐阴道缝扎、放置吻合器、套扎等措施避免肿瘤暴露;推荐经阴道缝合阴道残端,缝合前需充分冲洗盆腔、腹腔及阴道残端,最大限度降低肿瘤细胞播散机会。(推荐等级:2A类)
4、主要并发症及随访
同《子宫颈癌腹腔镜技术诊治指南(2023年版)》。
参考文献:中国医师协会微无创医学专业委员会妇科肿瘤学组,中国抗癌协会妇科肿瘤专业委员会.机器人辅助手术治疗子宫颈癌中国专家共识(2024版):附视频[J].机器人外科学杂志(中英文),2024,5(1):102-108.
[声明:本网站所有内容,凡未注明来源为“转载”,版权均归巢内网所有,未经授权,任何媒体、网站或个人不得转载,否则将追究法律责任,授权转载时须注明“来源:巢内网”。本网注明来源为其他媒体的内容为转载,转载仅作观点分享,版权归原作者所有,如有侵犯版权,请及时联系我们]


相关推荐
